论坛背景
CCF YOCSEF上海-技术论坛
随着具身智能及机器人技术的快速发展,如何加快具身智能技术与设备的落地与产业化应用,已成为业界广泛关注的焦点。具身智能代表了人工智能技术发展的高级阶段,要求智能系统或机器人能够通过与环境的感知和交互,自主完成任务,并持续增强自身的智能水平。大模型技术的发展为推动具身智能技术的商业化应用提供了重要契机。然而,如何界定大模型技术在具身智能领域的能力边界,分析具身智能技术最有可能在哪些场景实现突破,以及如何构建具身智能的商业模式并明确其定价体系,仍是需要深入探索的课题。
为进一步探讨具身智能产业发展的关键问题,探索其商业化模式,2024年8月24日,由中国计算机学会主办,CCF YOCSEF上海学术委员会组织实施,并由复旦大学计算机科学技术学院和上海擎朗智能科技有限公司联合支持的“CCF YOCSEF上海‘具身智能产业化实现路径的机遇与挑战’技术论坛”在复旦大学逸夫楼601会议室举办。论坛由CCF YOCSEF上海学术委员戈维峰和秘书长刘斐共同担任执行主席。
来自上海的高等院校、科研机构以及企事业单位的专家学者、企业代表,以及CCF YOCSEF总部副主席金一,学术秘书张莹,学术委员赵恺、王宏宁;CCF YOCSEF上海主席邱锡鹏,副主席李洋、赵登吉,学术秘书朱能军、郭畅,学术委员李晋国、许盛诚,委员魏宪、张奇、杨慧烨、孔浩、张晔、朱昌明、周海昌;CCF YOCSEF苏州分论坛副主席徐峰磊、CCF YOCSEF杭州分论坛学术委员盛志鹏等50余人出席了现场讨论。与此同时,CCF YOCSEF总部学术委员鄢兴雨、青岛学术委员仲国强、郑州主席任建吉、合肥学术委员周锐等通过线上方式参加了研讨会。本次论坛是CCF YOCSEF上海“具身智能”系列论坛的第三次活动,也是CCF YOCSEF总部“大模型落地之路:挑战与演进”系列论坛的组成部分。论坛聚焦于具身智能的产业化实现路径,旨在推动相关技术的科学研究和产业化落地。
在论坛开幕致辞中,CCF YOCSEF上海主席邱锡鹏详细介绍了CCF YOCSEF的文化内涵和上海地区活动的独特之处,并向与会嘉宾和参会者对本次论坛的大力支持表达了诚挚的感谢。同时,他还热情邀请青年精英积极参与CCF YOCSEF上海组织的各类学术与技术交流活动。

邱锡鹏论坛开场
来自 CCF YOCSEF总部学术委员的赵恺对系列论坛的整体规划、组织与安排进行了介绍。

赵恺介绍系列论坛情况
论坛执行主席戈维峰对本次技术论坛的背景和具体内容进行简要介绍,提出了当前存在的“大模型在具身智能领域的能力边界不清晰”、“具身智能研发成本高昂”以及“缺乏统一的标准和生态系统建设”三个主要问题。

戈维峰介绍具身智能背景
引导发言
CCF YOCSEF上海-技术论坛
《不确定性下的机器人决策规划》
上海交通大学清源研究院
蔡盼盼通过列举具体案例,探讨了机器人在高度动态且充满不确定性的环境中实现人类级别的运动和决策能力的挑战,尤其是在自动驾驶场景下的应用。她首先解释了高度动态的不确定性环境,如印度和非洲复杂的交通状况,并指出当前自动驾驶技术在应对这些挑战时仍存在显著不足。她提出,要实现实时可靠的决策,关键在于理解和建模不确定性。发言中详细讨论了如何通过概率推断来处理感知层面和人类行为层面的不确定性,特别是通过引入“意图”这一辅助变量来进行更结构化的预测,并以此构建人类行为模型。蔡盼盼还介绍了部分可观测马尔可夫决策过程(POMDP)作为应对不确定性下决策的数学模型,强调通过信念树搜索进行动态规划。然而,她也指出,传统算法在面对现实世界的复杂度时仍存在计算量过大、采样不足和模型误差累积的问题。为了解决这些问题,她提出了将规划与学习相融合的策略,利用学习策略来引导规划算法的搜索方向,从而在大规模动态环境中实现更高效的实时决策。这一方法在自动驾驶等领域展现了潜力,但仍需进一步研究以应对剩余的挑战。
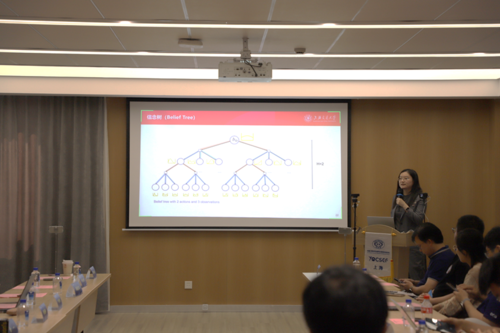
蔡盼盼引导发言
《具身智能工业应用探索》
国家机器人检测和评估中心
蔺道深在发言中探讨了智能技术在工业领域的应用,指出尽管工业环境相对结构化且确定性较高,但智能技术的应用仍面临不确定性的挑战。他提到,国家发改委正在推动工业AI项目,人工智能在工业机器人智能化评估中的应用逐渐深入,特别是在广州的工业AI项目中展现出积极进展。蔺道深结合多个实际案例,介绍了大数据和强化学习技术在工业中的具体应用,并讨论了协作机器人和自适应机器人等新概念的兴起。

蔺道深引导发言
他强调,尽管大模型和生成式AI在工业控制中展示了潜力,但这些技术仍存在显著的局限性,特别是在安全性、可靠性和“幻觉”问题方面。蔺道深指出,大模型的复杂性带来了智能涌现的前景,同时也对其安全性和可控性提出了新的挑战。此外,他提到,现有的智能技术在满足高速、高精度工业环境的需求上仍有不足。在解决这些问题的过程中,蔺道深呼吁建立可解释、鲁棒的人工智能理论,发展安全、可信、可扩展的智能技术,并推动产业应用的落地。他还强调了标准制定的重要性,建议在产业发展初期避免过度限制,允许技术在一定程度上的“野蛮生长”。最后,他提醒业界在推进智能技术应用时,必须关注可能带来的安全和伦理问题。
《OpenLoong通用人形机器人开源项目》
人形机器人(上海)有限公司
首先,他介绍了国创中心的背景和使命。该中心刚刚成立,旨在走中国特色的技术研发与具身智能产业化道路。他强调,国创中心的目标是通过开源的方式推进技术发展,特别是推出了开源公版机,旨在为产业界提供基础设施支持。接着,尹云鹏讲述了开源项目的主要内容。他详细介绍了如何开放基础技术,包括图纸、代码、数据集等。他认为,建立一个开放的产业共融社区对于推动技术进步至关重要。特别是在人形机器人领域,技术壁垒已经难以建立,通过开源合作将有助于整个行业的发展。最后,尹云鹏展望了国创中心的未来发展方向。他提到,中心将通过开源社区吸引和培养人才,并建立全球最大的人形机器人智库平台。他还分享了中心如何通过开源平台与高校、企业建立合作,共同破解技术难题,并推动整个行业的技术标准化与产业化。通过这些努力,国创中心将推动中国在新兴的国际竞争格局中占据有利地位。
尹云鹏引导发言
《具身智能及其在机器人领域的应用》
上海大学计算机学院
在报告中,辛立眀的演讲从哲学角度探讨了智能的概念,回顾了古今中外的哲学思想对智能的理解与发展。他首先从西方哲学起源讲起,提到古希腊哲学家泰勒斯的“万物皆水”思想,并将其与中国老子的“万物源于道”进行对比,认为中国哲学在对智能的认识上更为深刻。辛立眀指出,古代哲学对智能的看法经历了从独立于身体的纯智性思考到后来的经验主义与怀疑论,逐步认识到智能与身体及环境的紧密关联。海德格尔和梅洛庞帝等存在主义哲学家进一步提出了智能与环境及身体不可分割的观点,认为智能来源于身体,且受环境影响。在演讲中,他还谈到了李飞飞在《Nature Communications》上发表的文章对具身智能的引领作用,并探讨了具身智能在机器人领域的应用。他将具身智能分为三个方面:形态智能、行为智能和主动交互感知。他强调,形态智能是仿生学研究的核心,行为智能涉及到机器人在不同环境中的适应性,而主动交互感知则是提升机器人智能性的重要手段。最后,辛立眀提出了“认知卸载”的概念,即智能不仅存在于大脑中,也存在于身体的各个部分。他还强调了大模型在具身智能中的应用,认为要像人类一样,以少量资源实现高智能化是未来的研究方向。这些探讨展示了哲学思维在理解与推动智能研究中的重要性。

辛立明引导发言
思辨环节
CCF YOCSEF上海-技术论坛
在思辨环节中,思辨引导嘉宾和参会人员对三个思辨问题展开了充分的讨论。
YOCSEF广州主席、中山大学李冠彬首先指出,大模型对具身智能领域带来了诸多显著变化。首先,语言理解能力的提升使得大模型成为具身实体与环境交互的重要接口,大幅度增强了任务的通用性。同时,多模态大模型的出现使得语言、视觉及传感器数据的融合更加高效,并且表现出较强的泛化能力。李冠彬也指出,大模型的强大能力也带来了隐私、安全与伦理方面的新挑战。在研究范式上,他强调大模型推动了从专用场景向通用场景的转变,打破了传统的特定任务限制。然而,在决策领域,大模型的能力缺陷仍然明显,尤其是在具身智能体的任务规划中,仍需探索更合适的技术路径。YOCSEF总部副主席、北京交通大学金一讨论了大模型如何在多轮交互中融合认知与行动,带来了机器人智能技术领域的进步和发展。她提到,大模型在知识背景和推理能力上的进步,使得具身智能体在复杂环境中的任务执行表现有了显著提升。其研究范式也因此发生了变化,从传统的小模型与强化学习方法逐渐过渡到利用大模型处理复杂任务。然而,金一也指出,具身智能技术本身仍然存在许多未解决的问题,尤其是在实时决策、物理交互以及传感器材质的限制等方面。这些问题也对现有技术体系造成巨大挑战,亟待进一步研究与突破。上海交通大学李永露则从具体实验操作的角度出发,探讨了大模型在机器人领域的实际应用。他指出,大模型主要用于高级别的语义和视觉联系,但在具体的分割、检测、跟踪任务中,小模型仍然更具优势。此外,李永露强调了大模型在规划与控制方面的不足,尤其是在数据不足的情况下,具身智能机器人无法有效执行复杂的任务。未来,数据获取、硬件支持与软硬件协同发展将是具身智能领域亟需解决的关键问题。

思辨嘉宾发言1
来自学术界的思辨引导嘉宾和与会者认为,大模型在推动具身智能领域发展的同时,也揭示了当前技术面临的边界与挑战,未来的研究应着眼于打破这些限制,实现更广泛的应用。
微软人工智能与物联网实验室首席架构师陈志强认为,具身智能技术的突破首先可能出现在制造业中的工厂组装产线上。他强调了具身智能的成本效益和ROI(投资回报率),指出在实际落地过程中,具身智能的广泛应用依赖于边际成本的大幅下降;人形机器人在制造业中的组装产线中具有特别的潜力,因为这些场景需要一定的活动范围和灵活性,而不是简单的机械臂操作。陈志强认为,数据是实现这些突破的决定性因素,特别是在语言模型和多模态模型的积累基础上,这些数据能够推动具身智能的进一步发展。上海开普勒机器人有限公司软件研发总监陈春玉从机器人技术本质的出发,认为具身智能与智能机器人的本质都在于提升机器人的通用性与智能化,是所采用的技术手段与路线有所区别。他指出,在现阶段具身智能在机器人落地应用领域的突破更多的在于机器人任务规划、任务理解与场景理解上,在经典控制与视觉路线上存在局限性。他认为通过大模型技术的引入,机器人在任务理解、规划与自主执行方面会有显著提升。陈春玉还提到,现阶段具身智能在机器人领域的突破需与模块化的经典技术相结合,而数据是关键的决定因素之一。上海智元新创公共事务副总经理吴蔽余从企业的角度出发,强调了具身智能技术商业化的重要性。他认为,企业需要务实的路线图,逐步推进技术迭代和商业化应用。他指出,工业、商业和家庭是具身智能逐步应用的三个主要场景。目前,在工业领域,具身智能机器人已经在机床上下料和复杂物料的组装中取得了一些进展。吴蔽余认为,信仰和商业化能力是推动具身智能技术突破的核心因素,资源的持续投入和市场的造血能力至关重要。

思辨嘉宾发言2
三位嘉宾从不同角度阐述了具身智能技术在机器人应用中的潜在突破。陈志强侧重于成本效益和数据积累,认为制造业中的工厂组装产线是首个突破口。陈春玉则关注任务规划和自主执行能力的提升,强调大模型技术与传统控制技术的结合。而吴蔽余则从企业商业化角度出发,提出务实的技术路线图和信仰是推动具身智能突破的关键。综合来看,数据与技术的融合以及持续的商业化投入是具身智能技术实现突破的决定性因素
上海擎朗智能科技有限公司系统架构师温天宇从商业模式、具身智能的挑战、案例分享以及商业模式的核心等几个方面进行了回答。温天宇首先尝试解构商业模式,强调它是企业如何传递价值给客户并获取收益的过程。他特别关注产品的定价策略,强调客户愿意为机器人功能支付多少费用,以及企业如何从中获利。温天宇提到在研发过程中遇到的实际困难,如机器人电池续航问题、机械臂的安全性等。他认为,具身智能技术的商业化落地需要首先确保机器人能够在现实场景中提供实际价值,并且成本可控。他提到一个服务机器人的案例,通过智能化功能的提升,机器人能够承担更多任务,从而提升其价值,并提高价格。此外,他还分享了在海外市场推广机器人时面临的挑战,如电梯兼容性问题。温天宇认为,智能机器人的商业模式依赖于产品、价格、地点和促销的综合考虑。通过智能功能的提升和成本控制,企业可以在特定市场上实现商业化成功。上海傅利叶智能科技有限公司副总裁曾翔从商业模式的共性与独特性、市场需求与技术发展、开放性的重要性几个方面进行了回答。曾翔认为,智能机器人的商业模式与智能手机、电动车等典型人机互动终端相似,都是从研发到应用再到商业化的循环。他强调,只有研发达到一定水平,机器人才能满足应用场景需求,并实现商业化收益同时,他指出,具身智能技术的商业模式具有更大的开放性,类似于PC时代的开放生态。他提到,市场需求量大但技术难度不高的领域,如迎宾接待、卖货等,可能会是具身智能机器人商业化的突破点。高科技领域的科研应用通常会先发,这也是技术发展的自然规律。曾翔强调,具身智能技术的开放性是其长期繁荣的关键。这种开放性不仅包括硬件本体,还涉及软件开发者在平台上丰富生态体系,从而降低成本。

思辨嘉宾发言3
思辨环节主要观点输出
CCF YOCSEF上海-技术论坛

1
大模型技术的崛起正彻底改变具身智能的游戏规则。
这一技术的引入不仅大幅提升了智能机器人的处理和学习能力,还使其能够在更复杂的场景中游刃有余地操作,突破了传统单一任务的限制。机器人如今能够跨越服务业、工业制造等多个领域,展现出前所未有的广泛应用潜力。大模型带来的泛化能力将推动智能机器人从专用工具蜕变为多功能平台,为产业带来新的增长引擎,并重塑生产和生活的格局。

2
具身智能的商业化先锋将瞄准市场需求大且技术门槛低的应用场景。
迎宾、接待、物流配送等领域因其高需求和现有人工成本高昂,将成为具身智能技术的首个突破口。这些场景对技术要求相对简单,使得企业可以以较低的研发投入迅速收获经济效益。通过在这些领域的成功应用,具身智能将积累宝贵经验,优化技术,为未来在更复杂环境中的应用铺平道路。

3
具身智能技术的成功将取决于其开放性的深度。
开放不仅仅是硬件架构上的自由,更包括大模型开发与应用的开放平台。通过构建开放平台,更多的研发者和开发者将能够加入到具身智能生态系统的建设中,加速技术进步,丰富应用场景,并降低整体成本。尽管智能机器人在初期可能因技术复杂和高成本而定价较高,但随着技术成熟和市场竞争的加剧,价格将逐步合理化。价格体系的最终形成,将是具身智能技术广泛普及和商业化的关键。
尾声与总结
CCF YOCSEF上海-技术论坛
在论坛尾声,各位引导发言和思辨引导嘉宾为总部系列论坛在大模型能力需求、发展思路等方面提出了各自的观点和思路。此次论坛历时四个多小时的激烈讨论,围绕具身智能产业化实现路径的机遇与挑战开展了深入思辨。本次论坛也探索了线上线下同步讨论的新模式,开设了线上研讨会,来自青岛的仲国强通过线上“举手”抢话筒发表了思辨观点。论坛活动也通过CCF YOCSEF上海视频号进行了直播,累计观看人次超过1600次。

参会合影